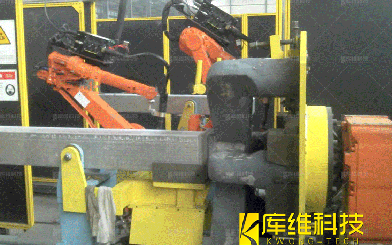
在工程機(jī)械行業(yè)�,焊接機(jī)器人已經(jīng)較廣泛的應(yīng)用于各種工程機(jī)械工件的制造。專門的機(jī)器人焊接系統(tǒng)運行穩(wěn)定可靠����,本體及控制系統(tǒng)通過電弧跟蹤功能、接觸傳感功能���、焊接專家數(shù)據(jù)庫等智能化功能��,對中厚板焊接領(lǐng)域存在的工件尺寸���、焊腳尺寸較大���,焊接坡口加工�����、工件組對精度較差等問題進(jìn)行了解決���,焊縫成形效果和焊接穩(wěn)定性均較好����。
焊接機(jī)器人在得到越來越廣泛應(yīng)用的同時���,也正向更高程度的自動化與智能化方向發(fā)展�。近年來不斷涌現(xiàn)具有代表性的機(jī)器人焊接新技術(shù)�����,這些技術(shù)從生產(chǎn)效率�、精度要求��、操作性���、適應(yīng)性等方面顯示了焊接機(jī)器人技術(shù)的未來發(fā)展趨勢,從研發(fā)完善逐漸走向推廣應(yīng)用�����。
(1)機(jī)器人示教再現(xiàn)與離線編程技術(shù)
現(xiàn)階段在工業(yè)生產(chǎn)中大量應(yīng)用的焊接機(jī)器人多為基于示教再現(xiàn)或離線編程的工作方式實現(xiàn)焊接作業(yè)����,在輔助以一定傳感技術(shù)的情況下能夠滿足自動化生產(chǎn)的基本需求,但其智能化程度仍然有較大的發(fā)展空間�����,包括以下幾個方面:易實現(xiàn)的示教�、焊接路徑自主規(guī)劃、自動生成焊接任務(wù)工藝參數(shù)�、直觀易用的人機(jī)交互系統(tǒng)設(shè)計、借助虛擬現(xiàn)實等技術(shù)實現(xiàn)焊接工作站的離線編程等����。
(2)焊接過程傳感與適應(yīng)性控制技術(shù)
集成了一種或多種傳感器的焊接機(jī)器人可實現(xiàn)對環(huán)境的感知、信息提取及處理,通過視覺�、觸覺等感知的反饋形成一定的閉環(huán)控制,對外部環(huán)境的變化具有一定的適應(yīng)力���,如焊接起始位置自動尋位��、焊縫自動跟蹤等��。更高智能程度的機(jī)器人需要能根據(jù)所獲取的信息進(jìn)行判斷�����、融合、決策�����。對于復(fù)雜環(huán)境具有更高的適應(yīng)性��,以完成更復(fù)雜的任務(wù)��,這是焊接智能化的未來發(fā)展方向�����。
(3)用于焊接工作站/生產(chǎn)線的多機(jī)器人協(xié)作技術(shù)
以焊接工作站或生產(chǎn)線的形式,采用多機(jī)器人協(xié)作技術(shù)實現(xiàn)多項焊接作業(yè)或焊接作業(yè)與定位���、安裝��、檢測等其他工序的同時進(jìn)行��,可極大地提高生產(chǎn)效率并能保證質(zhì)量����,進(jìn)一步減少人工介入�����,生產(chǎn)空間更緊湊�����。同時��,協(xié)同控制參與作業(yè)的多臺機(jī)器人或運動軸��,可從工序上避免其發(fā)生運動干涉或相互碰撞的問題�����,提高生產(chǎn)的安全性,減小生產(chǎn)線發(fā)生故障的概率��。
(4)適用于高能束焊接����、攪拌摩擦焊接等工藝方法的機(jī)器人技術(shù)
激光、電子束這類高能束焊接在運動軌跡高精度控制�����、輔助設(shè)備集成等方面對焊接機(jī)器人提出了特殊要求�。
(5)用于極限環(huán)境的焊接機(jī)器人遙控技術(shù)
在核環(huán)境、太空�、深海等特殊工況下����,需要采用遙控機(jī)器人替代人完成焊接任務(wù),極限環(huán)境在輻射���、氣壓�、水壓����、重力、溫度等方面的特殊性,要求焊接機(jī)器人在機(jī)械結(jié)構(gòu)���、電氣設(shè)計���、傳感方式、控制技術(shù)����、工藝方法等方面均具有應(yīng)對措施。

工業(yè)機(jī)器人在物流倉儲中的應(yīng)用效益研究

水刀切割機(jī)器人的操作流程是怎樣的����?
電解鋁陽極導(dǎo)桿焊接的常見安全措施
采用陽極鋼爪鋁導(dǎo)桿全截面焊接工藝的產(chǎn)品有哪些獨特之處����?

常見的工業(yè)機(jī)器人主要有哪幾個種類��?

機(jī)器人廠家如何助力企業(yè)提升競爭力與盈利能力

搬運碼垛機(jī)器人的廣泛應(yīng)用
陽極鋼爪鋁導(dǎo)桿全截面焊接技術(shù)設(shè)備的特點有哪些呢���?

工業(yè)焊接機(jī)器人的安全措施有哪些���?