在現(xiàn)代化自動化焊接技術(shù)中����,工業(yè)焊接機(jī)器人以其熱情活潑的工作原理成為解決方案。隨著科技的不斷發(fā)展���,我們已經(jīng)發(fā)現(xiàn)了傳統(tǒng)手工焊接的效率低下����、質(zhì)量難以保證等問題���。為了滿足大批量���、高質(zhì)量的焊接需求,工業(yè)焊接機(jī)器人應(yīng)運(yùn)而生��。
工業(yè)焊接機(jī)器人的工作原理可以簡單地劃分為三個步驟:感知�、決策和執(zhí)行。
首先�,機(jī)器人利用傳感器獲取環(huán)境和工件信息。通過激光或視覺傳感器�����,它能夠準(zhǔn)確感知焊接點的位置和形狀等與焊接相關(guān)的數(shù)據(jù)。
其次���,機(jī)器人會根據(jù)所感知到的數(shù)據(jù)做出決策����。它依據(jù)預(yù)先編程的算法和參數(shù)來確定焊接路徑和速度�,并根據(jù)工件的尺寸和形狀調(diào)整焊接參數(shù),以確保焊接的質(zhì)量和穩(wěn)定性���。在這個過程中��,需要借助高性能計算機(jī)系統(tǒng)進(jìn)行復(fù)雜計算和分析的支持。
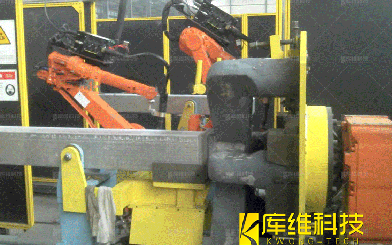
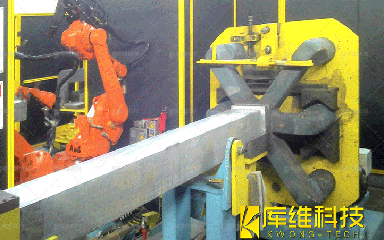
最后�,在決策的指導(dǎo)下,機(jī)器人便開始執(zhí)行焊接操作�����。它可以利用焊槍或激光焊接頭等工具�,按照預(yù)設(shè)的路徑和速度進(jìn)行焊接。機(jī)器人的機(jī)械臂具備自由移動的能力����,可以靈活地調(diào)整焊接位置和角度����。為了保證焊接的準(zhǔn)確性和一致性�,機(jī)器人會根據(jù)實時傳感器的反饋信息進(jìn)行控制和調(diào)整。
工業(yè)焊接機(jī)器人的核心在于自動化技術(shù)的應(yīng)用��。它能夠根據(jù)預(yù)設(shè)的指令和參數(shù)自主工作��,無需人工干預(yù)����。相較于傳統(tǒng)手工焊接,工業(yè)焊接機(jī)器人具有以下優(yōu)勢:
工業(yè)焊接機(jī)器人能夠大幅提高生產(chǎn)效率�����。它可以持續(xù)不斷地工作�����,毋須考慮疲勞和人為因素的影響�。機(jī)器人作業(yè)速度快且焊接質(zhì)量穩(wěn)定可靠,從而大大節(jié)約了生產(chǎn)時間和人力成本�����。
工業(yè)焊接機(jī)器人能夠提高焊接質(zhì)量和一致性。機(jī)器人可以精確執(zhí)行預(yù)定程序的焊接操作�����,避免了人為誤差和不規(guī)范操作可能導(dǎo)致的質(zhì)量問題����。焊接缺陷的發(fā)生率大幅降低,進(jìn)一步提升了產(chǎn)品質(zhì)量�。
工業(yè)焊接機(jī)器人在工作環(huán)境中具備良好的安全性。由于焊接過程中產(chǎn)生高溫和有害氣體����,手工焊接對工人的身體健康存在一定危害。然而����,機(jī)器人能夠在無人監(jiān)督的狀態(tài)下完成任務(wù)�,減少了工人的接觸風(fēng)險,提高了工作場所的安全性����。
綜上所述����,工業(yè)焊接機(jī)器人憑借其感知��、決策和執(zhí)行的工作原理實現(xiàn)了焊接操作的自動化�����。它的出現(xiàn)使得工業(yè)生產(chǎn)發(fā)生了翻天覆地的變化����,提高了生產(chǎn)效率、焊接質(zhì)量和工作安全性��。隨著科技的進(jìn)一步發(fā)展�,工業(yè)焊接機(jī)器人將在更多領(lǐng)域得到應(yīng)用,為各行各業(yè)的發(fā)展做出更大的貢獻(xiàn)��。
電解鋁陽極導(dǎo)桿焊接的常見安全措施
采用陽極鋼爪鋁導(dǎo)桿全截面焊接工藝的產(chǎn)品有哪些獨特之處����?

常見的工業(yè)機(jī)器人主要有哪幾個種類���?

工業(yè)焊接機(jī)器人的安全措施有哪些��?

工業(yè)焊接機(jī)器人的發(fā)展趨勢有哪些����?

工業(yè)焊接機(jī)器人:增進(jìn)生產(chǎn)效率的利器

如何挑選滿足需求的工業(yè)焊接機(jī)器人�?

未來生產(chǎn)力的代表:工業(yè)焊接機(jī)器人的應(yīng)用和發(fā)展

弧焊機(jī)器人在制造業(yè)的重要性及影響
