Photo: Stanford University
機械手是一種能模仿人手和臂的某些動作功能�,用以按固定程序抓取���、搬運物件或操作工具的自動操作裝置����。
機器人的形式一直是多樣的�����,而研究人員們一直往設計“能在更生活化的真實環(huán)境中使用”的策略方向發(fā)展���。設計能夠在擬人環(huán)境中工作的機器人的一個策略是使機器人本身盡可能的擬人化�。舉個例子�,如果到處都是樓梯,那么人類因為有腿且可以用來爬樓梯�,所以如果我們給機器人像人類一樣的腿���,他們也會“擅長”爬樓梯�����,對吧���?當機器人需要進行抓取動作時,我們(作者�,以下簡稱我)也看到了這種趨勢���,在朝著擬人化方向做優(yōu)化。
盡管受到人類自身生物的啟發(fā)而產(chǎn)生了一些驚人的機械手,但夾爪設計中仍有可能創(chuàng)造出人類無法做到的事情�。
在ICRA 2020上,斯坦福大學的研究人員發(fā)表的一篇論文中提到�,研究人員設計了一種機械手�����,該機械手的手指由致動的滾輪制成�,從而可以操縱物體,將手指打結(jié)���。
盡管它有幾根手指��,但該原型“滾輪抓緊器”手將擬人化的設計拋到了窗外�,而采用了獨特的手工操作方法�。滾輪抓緊器與其他設計用于使用活動表面(如嵌入手指的傳送帶)進行手動操作的抓取器有一些共同特點�����,但這里介紹的更加創(chuàng)新和令人興奮的是�,那些關節(jié)式主動滾輪指尖(或任何你想給它們起的非擬人化名字)提供了可操縱的主動表面。這意味著�����,手可以抓住物體并旋轉(zhuǎn)它們���,而不必求助于復雜的手指重新定位序列���,這就是人類如何做到的。
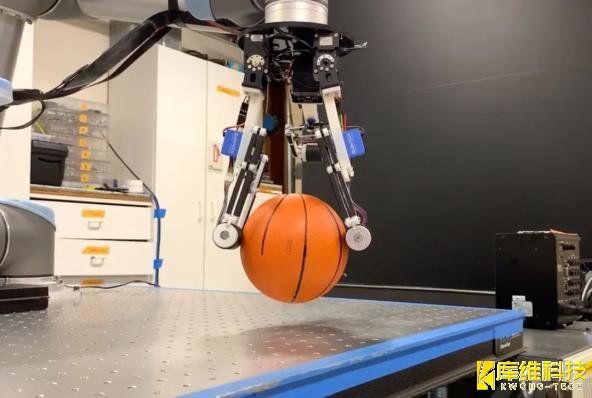
Photo: Stanford UniversityThings like picking something flat off of a table����, always tricky for robotic hands (and sometimes for human hands as well), is a breeze thanks to the fingertip rollers���。
手的每個手指都有三個驅(qū)動自由度�,這就產(chǎn)生了幾種不同的抓取和操縱物體的方法����。像是從桌子上取東西��,機器人的手(有時也有人的手)總是很棘手的�,這是由于指尖滾輪的緣故。物體在這個夾鉗中的運動不是完全完整的�����,這意味著它不能在不經(jīng)過其他中間步驟的情況下任意調(diào)整方向�。它也不符合許多其他抓取器的方式��,限制了某些類型的抓取�����。這種特殊的設計可能不會取代每一個手爪�,但它特別擅長某些特定的操作方式,使其獨特�。
我們應該清楚���,如果我們能用五個手指制造出機械手��,它具有我們自己手所具有的所有驅(qū)動力�����、傳感和控制能力��,那將是令人驚奇的��,但這可能還需要幾十年的時間�����。同時���,還有很多不同的設計需要我們?nèi)ヌ剿鳌?/span>
說到探索不同的設計,研究人員已經(jīng)在打造他們第二個版本的手了�����,它用指尖球代替指尖滾軸:
關于新版“手”的更多信息��,我們通過電子郵件與主要作者Shenli Yuan進行了交談��。
IEEE Spectrum:人手通常被視為操作的標準����。當增加人手沒有的自由度(如在你的工作中)可以使機器人手在許多方面比我們的能力更強時��,你認為我們還應該把人手看作是可以嘗試和模仿的東西嗎�?
Shenli Yuan:我們提出的設計是探索��,如果我們不受擬人化的限制,可以實現(xiàn)什么樣的獨特功能��,以及一個生物上不可能實現(xiàn)的機制在機器人操作中可能實現(xiàn)什么�。此外,對于很多任務來說��,嘗試模仿人手并不一定是最佳的���。也許在20到50年后,當機器人操作器變得更好的時候�,它們不會看起來像人類的手那么多。機器人學和生物學的設計約束有一些共同點(比如機械磨損�、有限的肌腱剛度)���,但也有很大的不同��。
“For lots of tasks���, it isn’t necessarily optimal to try and emulate the human hand��。 Perhaps in 20 to 50 years when robot manipulators are much better�����, they won’t look like the human hand that much。”
—Shenli Yuan��, Stanford University
什么是系統(tǒng)最難復制的人手操作能力�?
我想到了一些事情。它不能進行強力抓握(指用整只手抓握�����,而不是只用指尖的捏握)��,這是一種很容易由人手完成的動作���。它不能在任意方向或任意軸上瞬間移動或旋轉(zhuǎn)物體,盡管人手在這方面也有一定的限制�。這些限制的存在主要是因為這個抓手只有9個自由度,而人類的手有20多個自由度���。我們不認為這個抓取器是擬人手的替代品,而是一種提供獨特功能的方法����,而不需要與高度驅(qū)動的類人手相關的所有復雜性��。
這個手能做的最令人驚訝或印象深刻的事情是什么�?
最令人印象深刻的特點是它可以連續(xù)旋轉(zhuǎn)物體����,這對于類人機器人手來說是典型的困難或低效的。令人驚訝的是����,我們將大部分精力都投入到了抓取器的設計和分析中�,而且我們?yōu)檠菔舅鶎嵤┑目刂撇呗苑浅:唵?����。這種簡單的控制策略在很少的調(diào)整或反復試驗的情況下工作得出奇的好��。
有這么多自由度��,讓手做你想做的事情有多復雜����?
自由度的多少并不是控制它的困難所在。我們遇到的大多數(shù)困難實際上是由于在操作過程中滾軸和物體之間的滾動接觸造成的��。滾動行為可以被視為不斷打破和重新建立之間的接觸輥和對象�����,這種非常動態(tài)的行為引入了不確定性���,在控制我們的抓取����。具體來說���,很難估計每個與物體接觸點的速度,這些速度會根據(jù)物體和手指的位置��、物體形狀(特別是曲率)和滑動/不滑動而變化�。
還有其他關于Roller Grasper V2可以告訴我們的嗎?
Roller Grasper V2有球形滾柱�����,而V1有圓柱形滾柱�����。我們認識到�����,當滾柱和物體形成線接觸時���,圓柱滾柱非常擅長操縱物體��,但當抓取幾何結(jié)構(gòu)不允許每個滾柱和被抓取物體之間有線接觸時����,圓柱滾柱可能不穩(wěn)定����。球面滾子通過允許可預測的接觸點來解決這個問題���,而不管表面是如何定向的。
Roller Grasper V1的平行四邊形設計使轉(zhuǎn)軸偏離滾筒中心一點�,這使我們的控制和分析更具挑戰(zhàn)性。Roller Grasper V2的運動學更簡單�。基關節(jié)與手指相交,手指與樞軸關節(jié)相交����,樞軸關節(jié)與滾子關節(jié)相交。它的對稱設計和更簡單的運動學使我們的控制和分析更加簡單�。Roller Grasper V2的樞軸范圍也更大���,為180度�,而V1是限制在90度�。
在控制方面,我們實施了更為復雜的控制策略(包括手工制作的控制策略和基于模仿學習的策略)�����,以實現(xiàn)抓握者在手上的自主操作�。